Mine Warfare Scenario

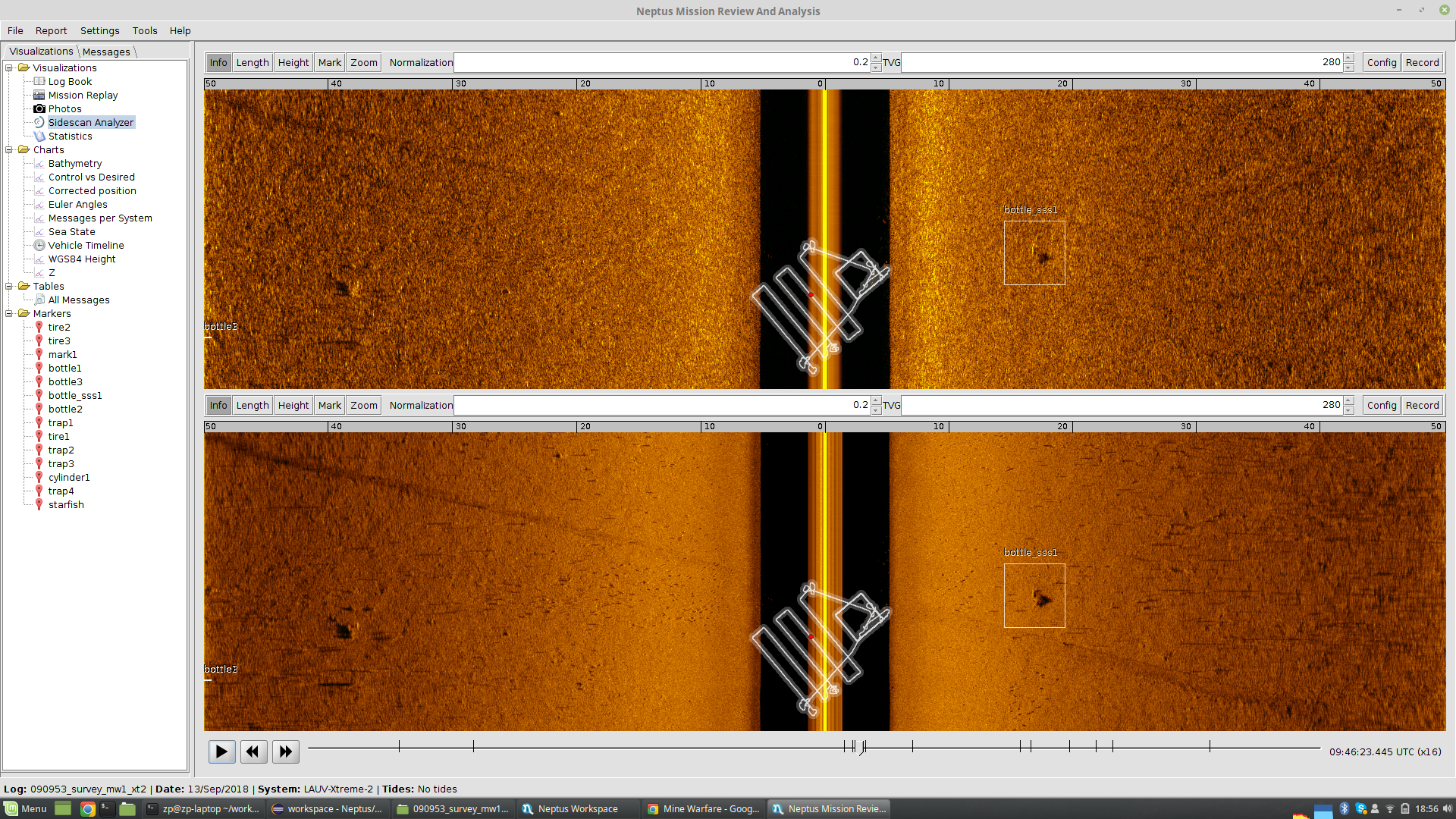
In this REP18 objective, different groups will use autonomous submarines to map the bottom of the sea floor and look for objects of interest. Prior to the REP exercise, the PT Navy has sunk several targets (dive cylinders) which are to be located. LSTS has participated with 3 different AUVs all equipped with (different types) of sidescan sonar and also cameras and magnetometer.
Typically, AUV magnetometers are towed so that electromagnetic interference from the AUV does not interfere with the readings. In the case of LAUV-Xtreme-2 vehicle, LSTS is using a self-compensating magnetometer which greatly simplifies the operations as it doesn’t need to be towed.
After initial sidescan surveys where the entire area got covered in about 30 minutes LAUV-Xtreme-2’s optical camera was used to photograph some of the contacts to validate that they were the targets sunk by the PT navy.